About
I am a postdoctoral researcher at the Institute of Visual Computing at Graz University of Technology, working in the group of Horst Possegger. In 2024, I finished my PhD thesis under the supervision of Prof. Horst Bischof, where I investigated how explainability can be leveraged to improve the performance of 3D object detectors.
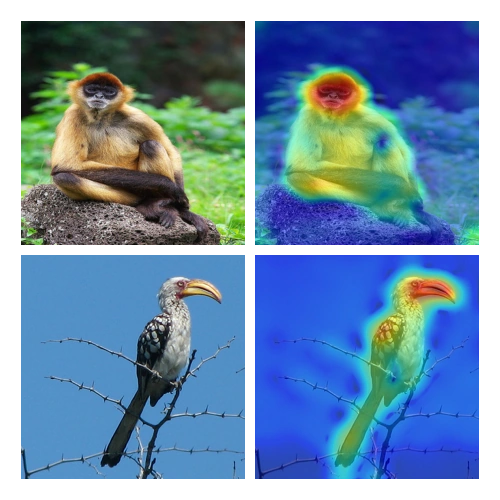
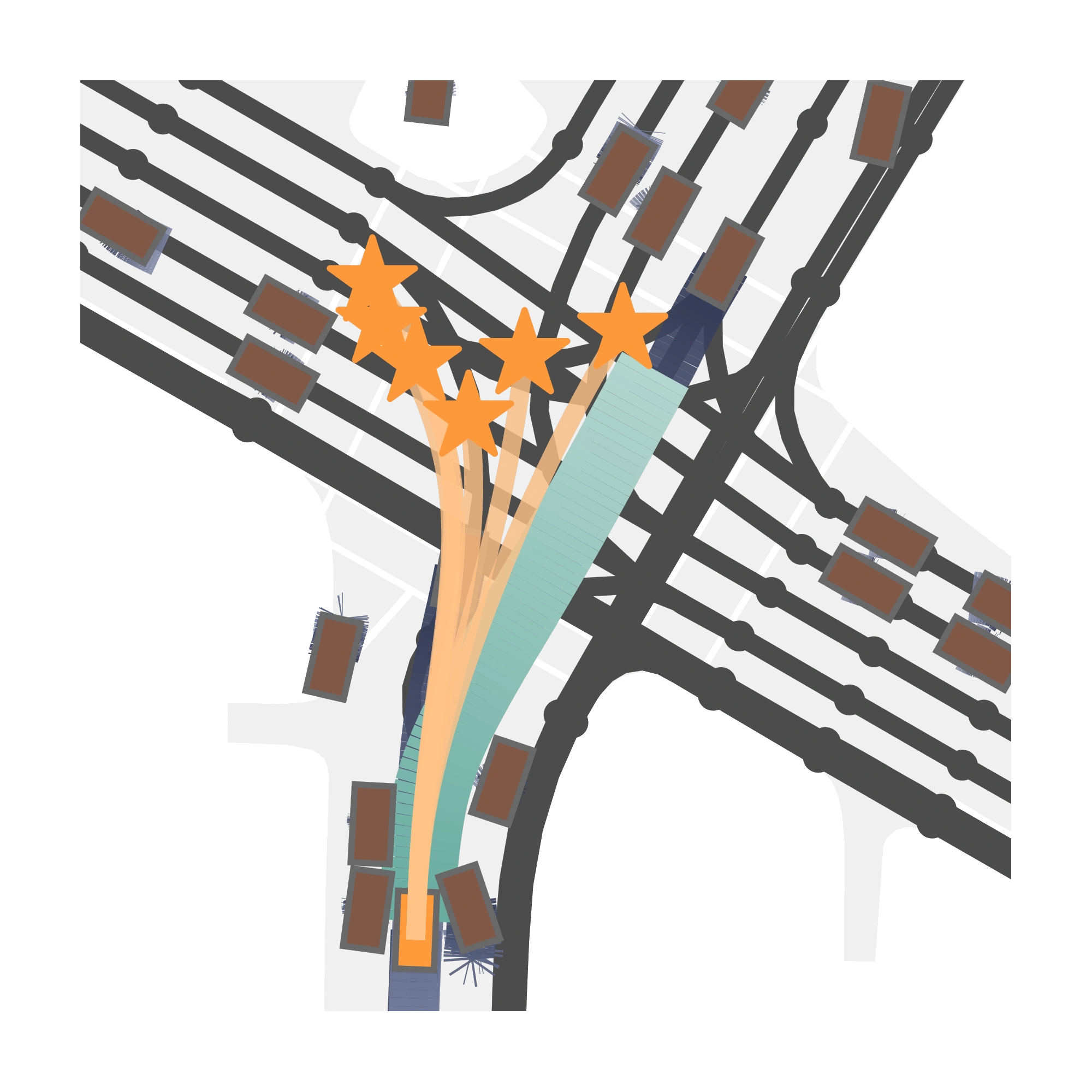
My research lies at the intersection of computer vision, 3D perception, and explainable AI. I am particularly interested in understanding what deep neural networks actually learn - and in making their decisions interpretable, trustworthy, and verifiable, especially for safety-critical applications such as autonomous driving.
Since 2022, I regularly serve as a reviewer for top-tier computer vision and machine learning venues, including CVPR, ICCV, ECCV, and NeurIPS, with a focus on explainability in 2D and 3D perception.
News
Selected Publications
NeurIPS 2025San Diego, California (USA)
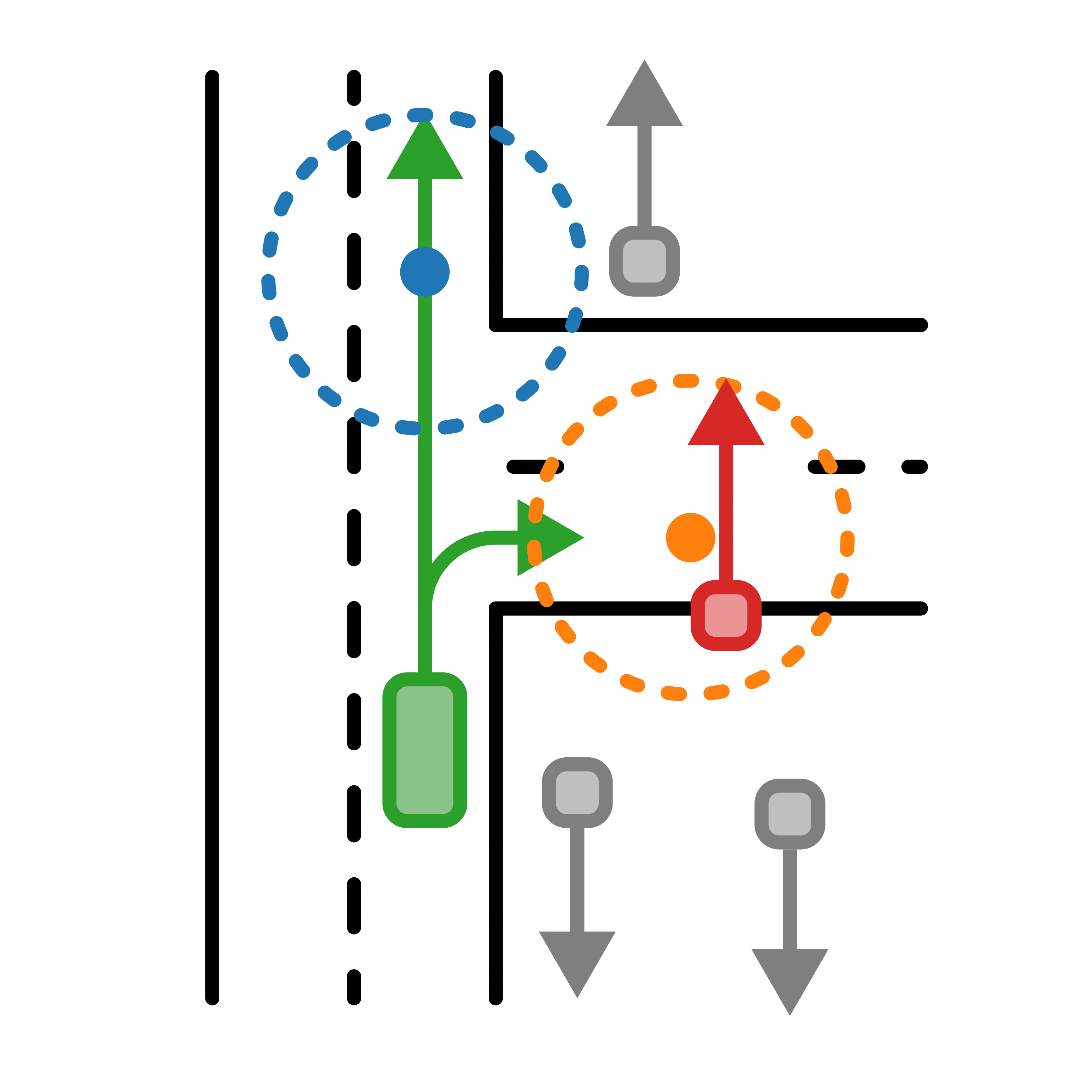
STSBench: A Spatio-temporal Scenario Benchmark for Multi-modal Large Language Models in Autonomous Driving
PhD ThesisGraz University of Technology (Austria)
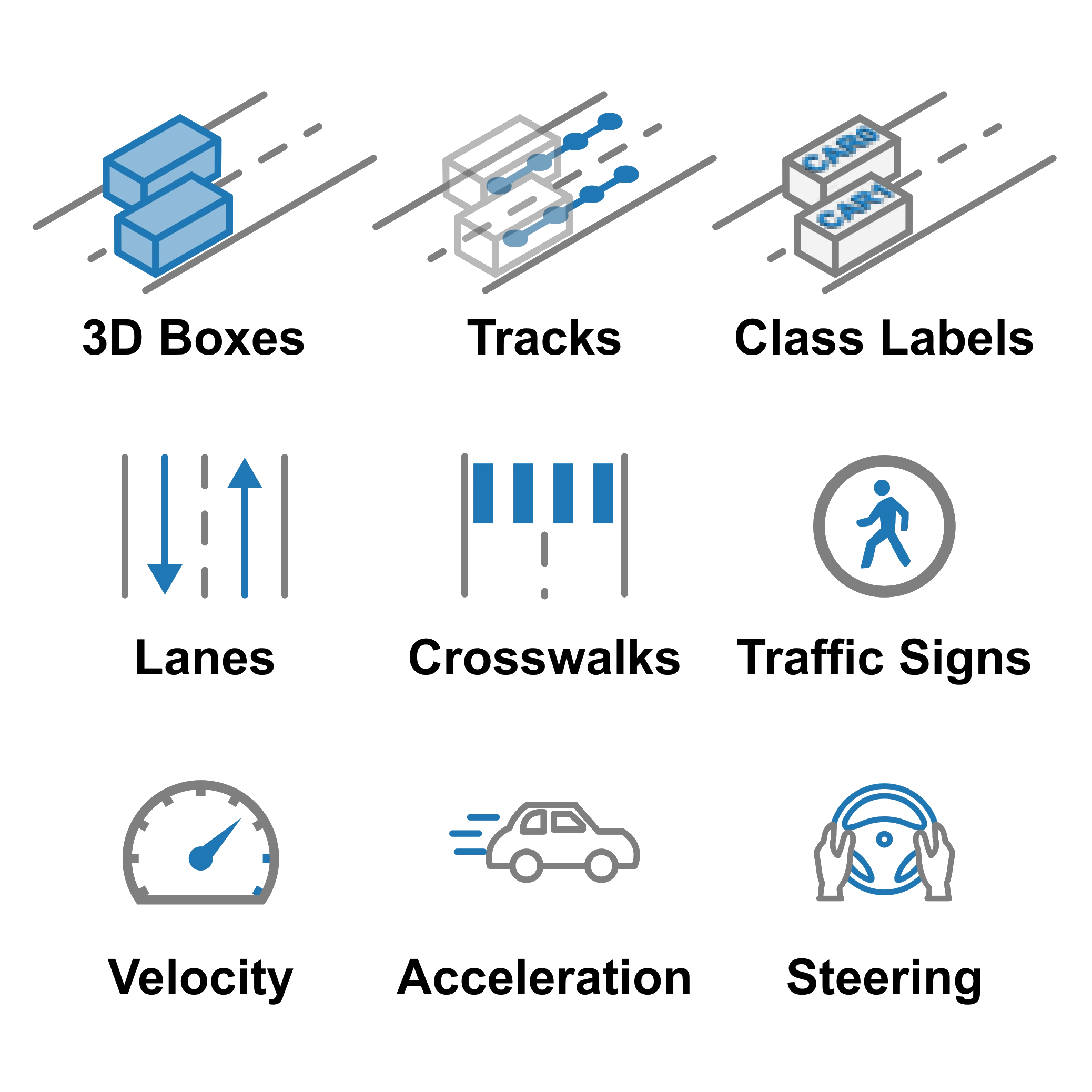
From Explanation to Optimization: Advancing LiDAR-based 3D Object Detection